我的存储笔记
存储介质,产品
块设备
比如HDD,SSD,它们:
- 允许访问固定块的数据
- 固定块的数据被称为
blocks:Block是由文件系统定义的最小的可寻址单元(大多数为4kb),见后文VFS部分
分布式存储
分布式存储主要包括文件、对象存储。典型的使用场景下,分布式存储组网由客户端,分布式文件/对象存储、万兆交换机、千兆交换机组成。客户端和存储产品通过万兆交换机连接(也可能是IB)。
存储理论
我们将从一次linux IO按照从前端到后端的顺序进行分解来看一下一个iO完成所需要经过的完整链路,按照如下顺序:
- syscall -> vfs(重点讲block-based fs)
很有意思的问题:
* why don't windows/Linux use relational Databases(RDBMS) *
文件系统的实现
首先理论方面的学习,主要是先抽象出一个极简的文件系统,再看看现实中的案例。
数据结构
文件系统在磁盘上使用什么类型的结构来组织数据和元数据 简单的文件系统可以是这样: 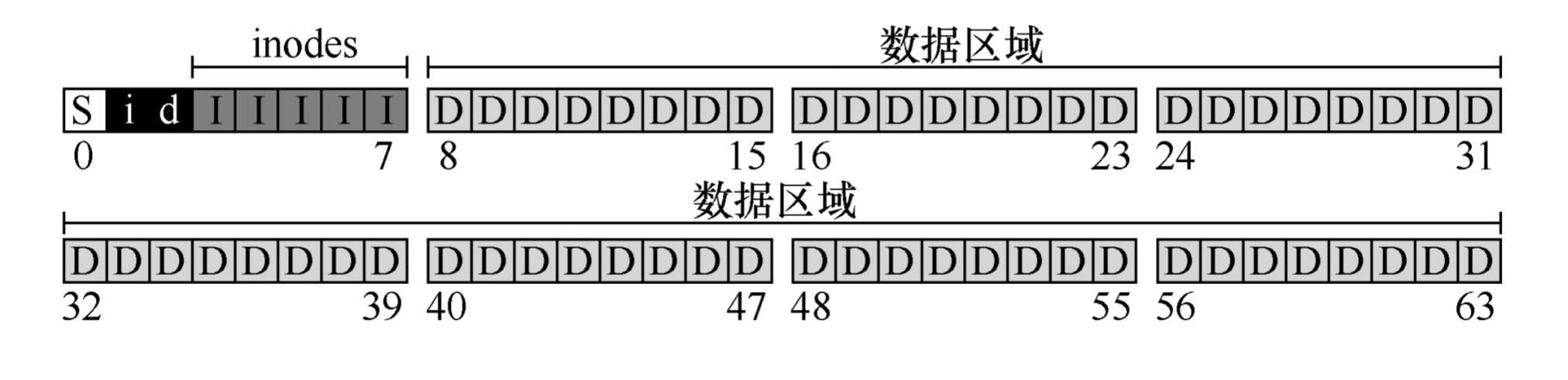
上图为一小块磁盘区域的数据内容,其中:
- 磁盘被分为64个小块(block),每块大小为4KB
- "D"代表数据,为用户数据的代表
- "I"代表inode,为存放文件元数据的结构
- "d"代表数据位图和inode位图,是一种用于管理空闲块的数据结构
- "i"代表inode位图,用于管理inode块的数据结构
- "S"代表超级块,用于存储文件系统本身的信息
放大0-7数据块(管理结构)的内容: 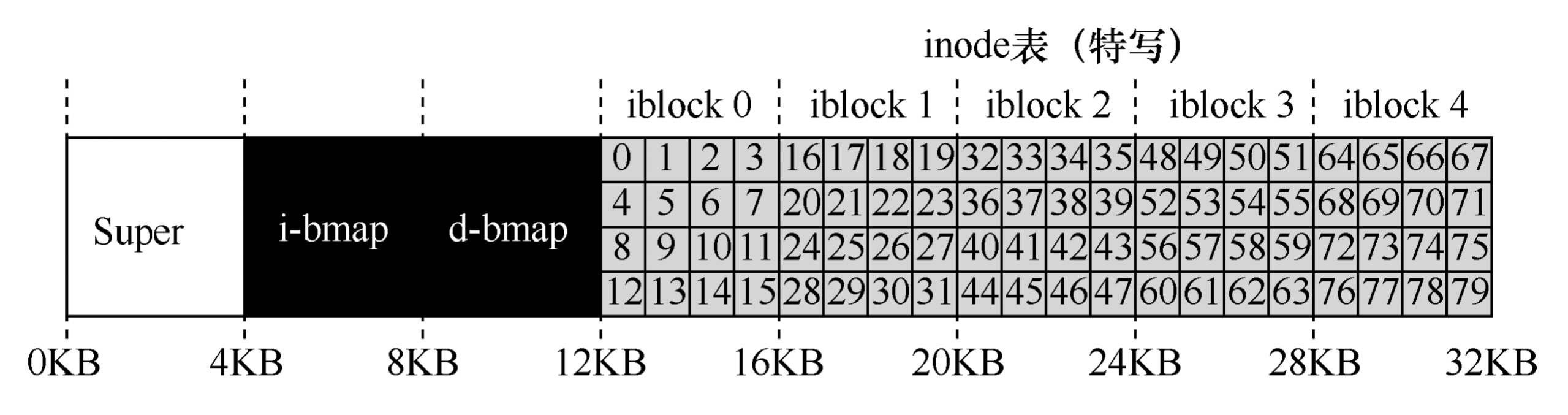 假设说,我现在希望获取inode32的数据,通过计算得知我需要获得第20KB位(inode大小为256字节)的数据 -> 文件系统要索引这个字节位的数据。但是磁盘是由可寻址扇区组成的(固态硬盘使用闪存芯片存储数据,闪存芯片被分为多个可寻址的扇区,每个扇区都有唯一地址),通常扇区是512字节,从而文件系统需要向40发出一个读取请求。
假设说,我现在希望获取inode32的数据,通过计算得知我需要获得第20KB位(inode大小为256字节)的数据 -> 文件系统要索引这个字节位的数据。但是磁盘是由可寻址扇区组成的(固态硬盘使用闪存芯片存储数据,闪存芯片被分为多个可寻址的扇区,每个扇区都有唯一地址),通常扇区是512字节,从而文件系统需要向40发出一个读取请求。
除了纯粹数据外的用户数据统称为元数据,设计inode时,最重要的决定之一是它如何引用数据块的位置,一个简单的方法是,将磁盘地址直接写入到inode中,使用这种方法有一个局限性是,对于很大的文件,将没有足够的空间来纳入这些地址。为了解决这类问题,人们想到了多级索引
分配一个块专门存其他块的地址,INODE设置12个(举例)直接指针和一个间接指针,一个块可以存1024个指针,则文件上限上涨至4144KB。想要继续扩容,则继续套娃。许多文件系统使用套娃(多级索引)的方法来满足文件大小上限的需求,比如ext2,ext3。
块I/O层
linux kernel有一个块IO层是块设备上层的“块抽象”,它像一层夹心饼干,在设备驱动和文件系统之间,文件系统对块设备的访问落到block layer就会变成一次'requests'。 大体上长这样: 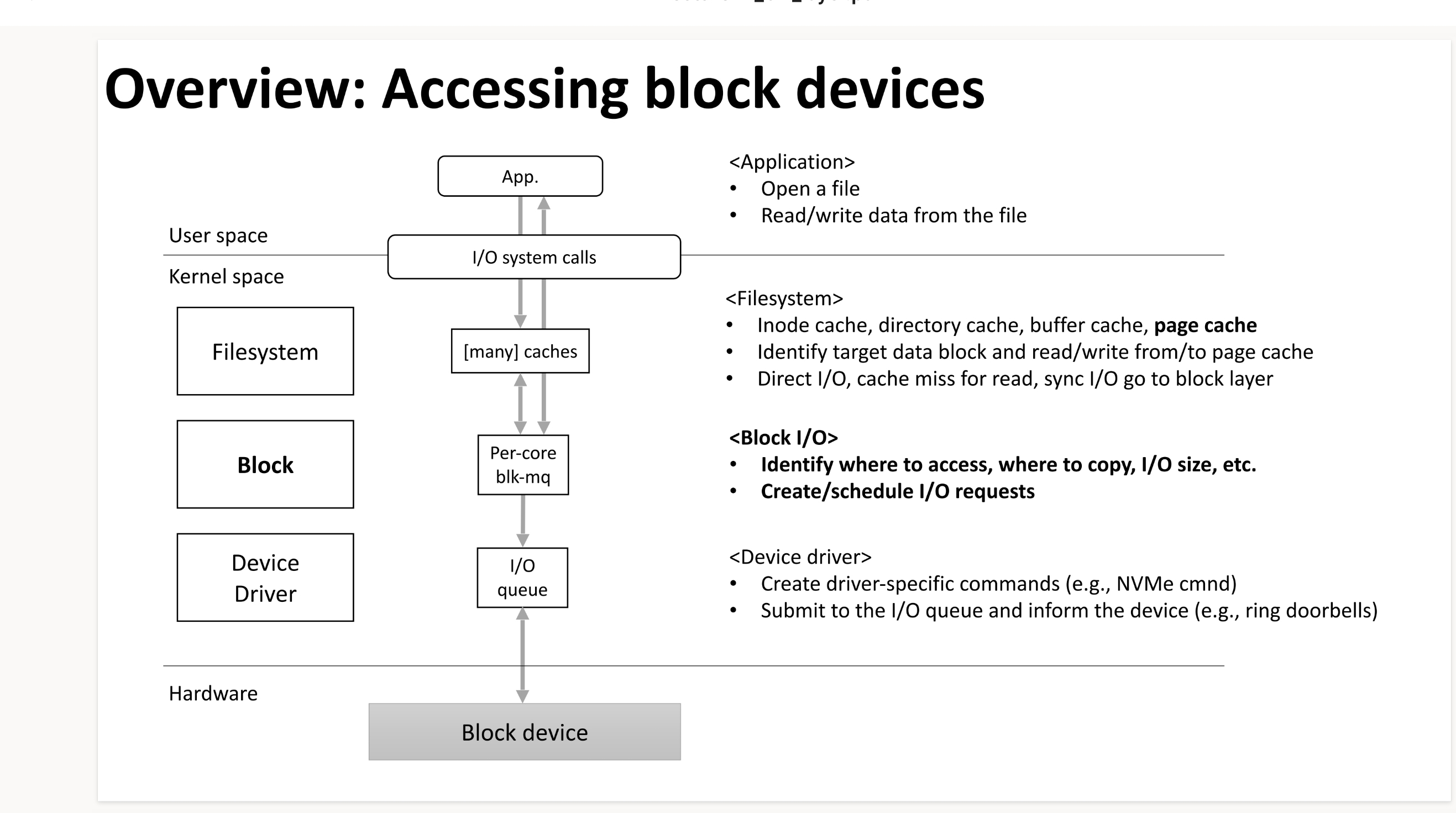
我们看到块IO层其中一个作用是找到哪里去访问以及拷贝,并确定IOSIZE,我们得提一下page cache这个概念,即页缓存,首先声明一点:页缓存最重要的作用便是提高文件系统的性能,当应用程序读取文件(或者说使用read系统调用)时,正常的调用链,OS会去查看页缓存中是否存在page cache中了,如果有就直接从当中读取了,所以理所应当地,page cache会存在比磁盘访问性能更高的内存中,下面给出一些命令来让你更深切地感受到page cache的存在。
# 该命令可以查看到当前linux系统中,页缓存的size
cat /proc/meminfo | grep "Cached:"关于块IO过程中的细节,可以看下文的一次IO的代价,这里我们讨论下,下发到驱动前,BIO对象中的"request"所包含的内容,我们先提出一些重要的问题:
- 我们知道文件层的io相关的信息:inode相关信息,按照request这个词本身的意义,我们想知道request会落到哪个设备
- 对于每个设备,一定会有多个
queue,我们如何知道request落到哪个queue - 细致考虑到执行过程,我们会想知道:这个req应该是由哪个cpu逻辑核来执行
带着这些问题,我们利用一些现成的工具来帮助我们回溯这个过程:即blktrace
块I/O层的功能
- 给VFS提供一个对不同介质磁盘统一的接口
- 文件系统构造BIO,将BIO传递给mapping layer,它将物理设备映射为逻辑设备,mapping layer使用到的技术是linux内核中的device mapper framework,这项技术依赖卷管理,多路径(multipathing),自动精简配置(thin provisioning),加密以及RAID,其中最著名的是LVM(logical voume management)
- blk-mq,将IO请求分配给每个CPU核,BIO请求会被分配到多个调度队列
- 处理IO请求的多个调度器
- 异常处理以及为IO请求进行统计的模块
如何定义块设备
Linux内核和外部进行数据交换的方式有两种,一种是同一时间只和外部设备交换一个字符,键盘和串口设备都是这种"Character device",能够这样处理的设备一般都是交换的数据量不大的设备。
在交换数据量很大的场景下,内核以固定的块作为单位来在设备上寻址,除了磁盘,CD-ROMs和闪存驱动都用这种方法来进行访问。
一个块设备,每次和内核交换N bytes,这个N取决于:
- 应用程序:来自用户空间的请求大小?
- 页缓存:4KB
- 基于磁盘的文件系统:介于512B~4KB之间
- 物理设备:在物理设备上,最小的可寻址单元被称为sector,通常是512字节
注意文件系统的block和block layer的"block"并不一致,后者的基础单元是"sector",内核中定义了"sector_t"类型,用于表示偏移量或者是大小,每一个单元是512的倍数。sector_t的类型是"unsigned integer",它们足够大因此满足寻址时的需求。
Linux系统中的几乎所有内容都可以从"文件表示"中找到,这包括了存储设备的硬件。/dev/sd*代表的就是最常见的磁盘驱动,*一般是代表磁盘发现顺序的字母,另一方面,加入该字母后跟随着数字,则该数字代表分区号,linux下将块设备打印出来的方法是lsblk命令。使用lsblk得到的标准输出中有一列是"MAJ:MIN",代表块设备的major号和minor号,前者用来标识一个磁盘驱动,而一个驱动可以和多个设备交互,后者就是用来区分多个设备的。
"块设备"的决定性特征
- 随机访问能力:设备能够从一个地址转移到另外一个地址来进行获取数据
- 能够通过固定大小的块的数量来寻址以及改写数据
- 可堆叠性:块设备可以通过device mapper framework进行堆叠,这个特性扩展了物理设备的功能性并且允许了逻辑卷的扩展
- buffered IO:块设备会使用缓冲区IO,即数据会在被写入设备之前被写进缓冲区,块设备上的读和写操作充分利用了页缓存,读和写操作在遇到块设备之前都会先到内存中
- 文件系统/分区:块设备能够被划分为更小的逻辑单元,从而在这些逻辑单元上构建文件系统
- 请求队列:块设备一般实现了提交到具体设备的块请求队列
内核中关于块的关键数据结构
内核中块的关键数据结构包括下列部分:
register_blkdev
block_device
gendisk
buffer_head
bio
bio_vec
request
request_queue
register_blkdev函数 块设备需要被使用,它首先必须被内核先注册,该函数就是注册函数,被定义在
include/linux/blkdev.h中:
int __register_blkdev(unsigned int major, const char *name, void (*probe)(dev_t devt))该函数从内核的动态主设备分配池中获取主设备号,一旦主设备号被成功获取,函数会创建一个block_struct结构体,代表着块设备的驱动,该结构体保安了主设备号,驱动名称以及指向驱动操作的函数指针。
- block_device结构体 该结构体被定义在
include/linux/blk_types.h中
struct block_device {
sector_t bd_start_sect;
sector_t bd_nr_sectors;
struct disk_stats __percpu *bd_stats;
unsigned long bd_stamp;
bool bd_read_only;
dev_t bd_dev;
atomc_t bd_openers;
struct inode * bd_inode;
...
}该结构体的实例会在设备文件被打开时创建,一个块设备可以是一整块磁盘或者是一个单独的磁盘分区。除了上述内容,该结构体还包含对gendisk的指针以及一个存储请求队列的数组
- gendisk结构体
block_device中一个重要的字段是bd_disk指针,指向的就是gendisk的结构体。其含义是物理磁盘,他被用于注册块设备以及关联IO操作。
struct gendisk {
int major;
int first_minor;
int minors;
char disk_name[DISK_NAME_LEN];
unsigned short events;
unsigned short event_flags;
...
}从上文我们可以得知:块设备有整块磁盘,也有分区,它们都有bd_disk这个字段。gendisk是被块设备驱动实例化以及控制的,一经注册,块设备驱动就可以通过该结构体来实现设备级别的IO操作,其中一些极其重要的字段如下:
- minors:代表该设备的minors数量
- fops:该字段指向的是文件操作,这些操作被内核调用,用来处理读写等操作
- private_data:存储和驱动绑定的一些信息
- queue: 该字段指向的是一个管理IO请求的队列(提交给设备的IO),从而,每个块设备都会有一个队列,内核可以独立地处理多个块设备的IO,从而避免遇到IO瓶颈
- buffer_head结构体 块设备广泛应用了页缓存,从而块设备上的读和写操作会表现在cache当中。当应用第一次读取某个位置的内容时,该块的内容会被获取并被写入到内存中。同样的,当程序想要往硬盘中写入数据时,写入操作首先是在cache当中进行的,每一次进行交换的数据被存在buffer中,该结构体便是由buffer_head来代表的。
struct buffer_head {
unsigned long b_state;
struct buffer_head *b_this_page
struct page *b_page
sector_t b_blocknr;
size_t b_size;
...
}- b_data: 该字段指向了data_buffer中的起始位置
- b_size:该字段表示了这段buffer的大小
- b_page:块存储对应到内存中的页
- b_blocknr:buffer的逻辑块号,
- b_state:一个位字段,用于表示缓冲区状态,比如BH_UPDATE代表buffer包含最新的数据。
- b_count:该字段记录了buffer_head的使用者数量
- b_page:指向页缓存中包含当前数据的页的指针
- b_bdev:指向的对应块设备的指针
buffer_head用作表示页缓存和其磁盘上地址的一个映射,在内核版本2.6之前,该结构除了映射作用外,还会作为每个IO的容器,但是该设计存在一个问题是内核势必会使用大量的内存空间来处理IO请求。
- bio结构体 受限于buffer_head结构体的局限性,bio结构体被创建来代表正要进行的块IO操作,文件系统将请求转换为一个或多个BIO,然后被送去block layer,bio的重要组成部件:
- bi_next:指向下一个bio结构体的指针。用于将一个IO操作表示为多个链接在一起的bio实例
- bi_vcnt:该字段指定了IO操作所需要的data buffers的数量,每一个data buffer被表示成一个bio_vec结构体,其包含了对内存对象的指针以及该buffer的长度
- bi_end_io:函数指针,指向了当IO完成需要执行的操作。用于释放该IO所引用的资源,并唤醒等待操作执行完的进程
- bi_opf:位掩码,用于指定IO操作相关的选项,比如强制同步I/O或者禁用写缓存等
- bio_vec结构体 bio_vec定义了上文所描述的IO具体内容
struct bio_vec {
struct page *bv_page;
unsigned int bv_len;
unsigned int bv_offset;
}- bv_page: 该字段指向了包含需要进行传输的数据所在的page的引用的位置
- bv_offset:page的偏移量(数据从何开始)
- bv_len:包含了要传输数据的长度
- request和request_queue结构体 这两个结构体被定义在include/linux/blk-mq.h以及include/linux/blkdev.h文件中, 后文会对这部分做具体介绍
blk-mq
原本Linux内核的IO请求队列是单队列,随着:
- 块设备随机读写能力的增强(SSD/NVME技术的发展)
- 众核架构的普及
原本的实现会带来一些问题:
- 频繁地核切换/中断降低了IO的性能
blkmq架构由两层队列构成:
- software staging queues:每个逻辑核绑定一条队列,从而不会被CPU争抢,每个IO请求会在其中进行重拍/合并,每个队列会绑定一个IO SCHEDULER
- hardware dispatch queues:对应设备驱动的数量
关于其中的关键数据结构:
- blk_mq_register_dev:该容器包含所有向BLOCK LAYER注册一个块设备的信息。提供了一些驱动能力的字段
- blk_mq_ops:该结构是一个引用对象,为块设备暴露了驱动的例程操作(OPS)
- blk_mq_ctx:每个CPU都会绑定的一个结构体,代表着一个每个CPU核心
device-mapper
一些存储的需求:
- thin provision
- snapshots
- volume management
- encryption
这些功能都会被linux的device mapper framework所cover,这一层级用于将物理块设备映射到高层级的虚拟块设备。用户态的API是dmsetup,它依赖的库是libdevmapper.so,该文件通过'ioctl'系统调用和内核交互,主要是将用户数据传输给/dev/mapper/control这个特殊的文件,而内核中的device mapper主要能被划分为三个模块:
- Mapped device
- Mapping table
- Target device
mapped device
一个块设备,可能是一整个磁盘,或者是独立的分区,可以被映射到其他设备上。被映射到的是一个逻辑设备,它们通常可以在'/dev/mapper'路径下看到,LVM中的逻辑卷就是被映射设备中的典型例子。值得注意的是,mapper设备本身使用的驱动就是mapper device driver
mapping table
注意一个mapping table保存的信息是对于一个映射本身而言的,它描述的是逻辑块地址是被如何映射出来的。
# 可以通过命令查看
dmsetup table /dev/mapper/myvg-mylvtarget device
不同的映射类型包括:‘linear‘, ’mirror’, 'snapshot', ...
- linear: 连续的块地址映射
- raid: 实现软件层面的raid映射
- crypt: 为块设备上的数据进行加密
- stripe:
- multipath:主机到存储涉笔有多条路径
- thin:创建大于物理设备的空间
通过device mapper,企业可以使用
- dm-cache
- dm-writecache 等target来制作存储系统的多层级缓存系统,比如用慢设备作为冷数据的储存点,快速设备作为热数据的储存点或者是缓存,机制包括:
- Write-back
- Write-through
- Write-around
- Pass-through (后续补充相关的实践)
block-layer的IO处理策略和调度器
IO调度器一般会有几种技术来优化磁盘性能:
- sorting(排序行程顺序IO)
- merging(向前合并,向后合并)
- coalescing(中间插IO请求)
- plugging(等一等,看等下有没有需要合并的)
非常容易理解,初衷就是减少寻道时间,把一些bio(被包在request中)直接按照连续性拼接在一起
多队列的IO调度器算法包括:
- MQ-deadline
- Budget Fair Queuing(BFQ)
- Kyber
- None
MQ-deadline
时延敏感性的调度策略,包含两种队列:
- 使用按照扇区编号进行排序的队列
- FIFO队列,按照它们的deadline进行排序,
IO的应用层面分析
一次IO的代价
首先我们看下linux下一次IO需要经过的路径: 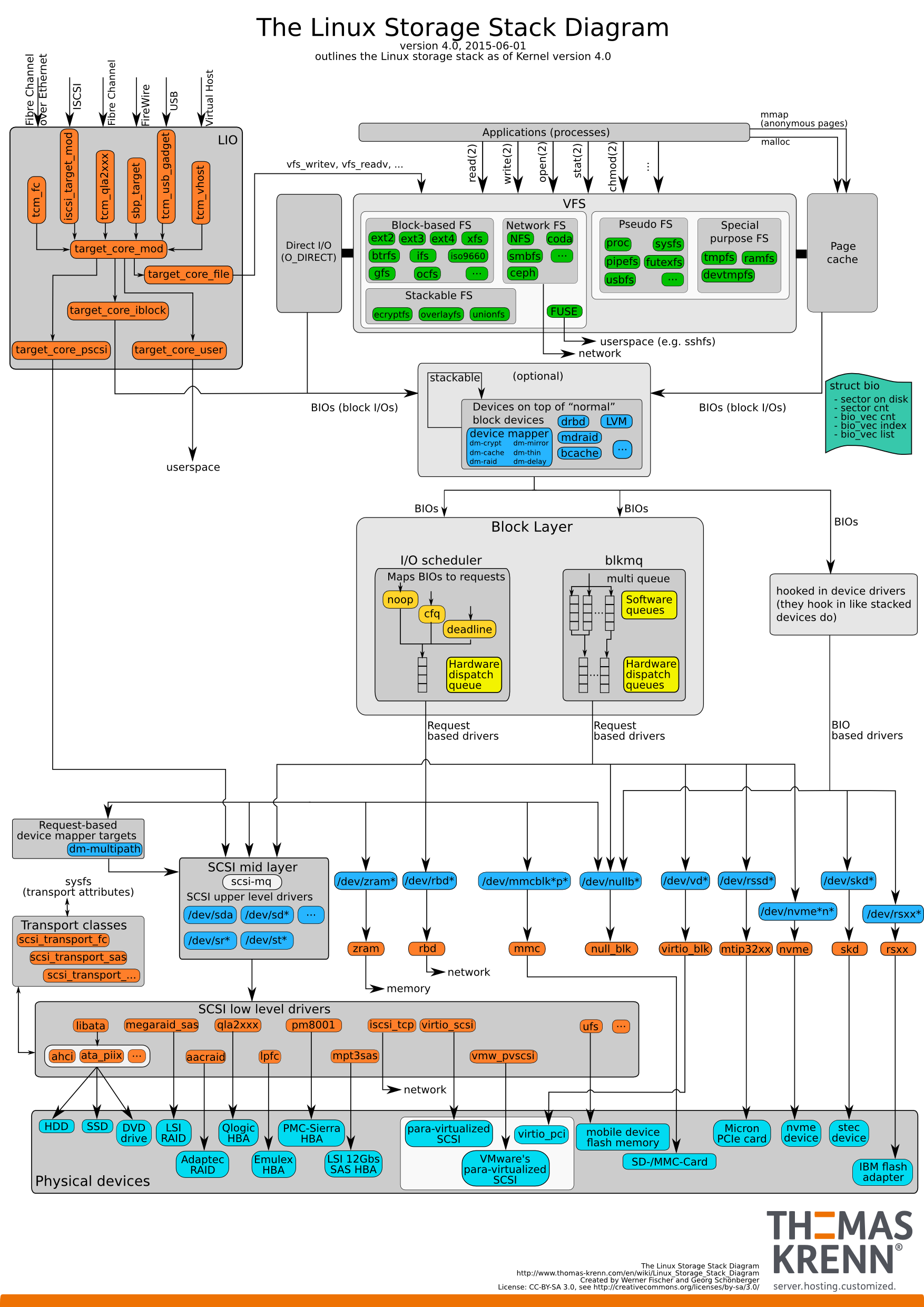
我们分析一次read操作的执行序列: 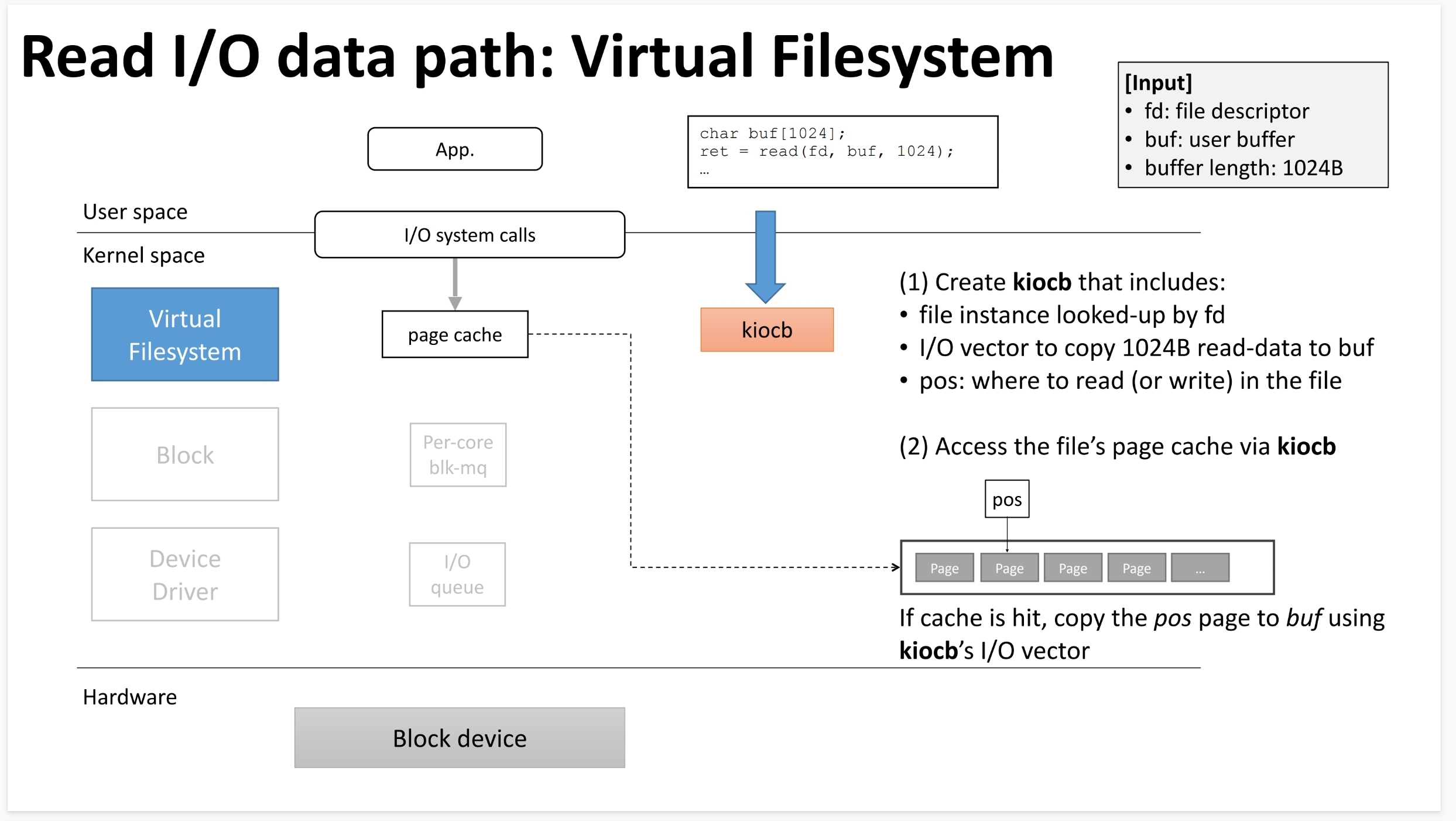
而对于bio对象,则是这样,bio会携带vfs带来的关于IO块的信息,用于落到驱动去查询对应的数据,查到数据后会将数据放到page cache中(非direct iO的情况下): 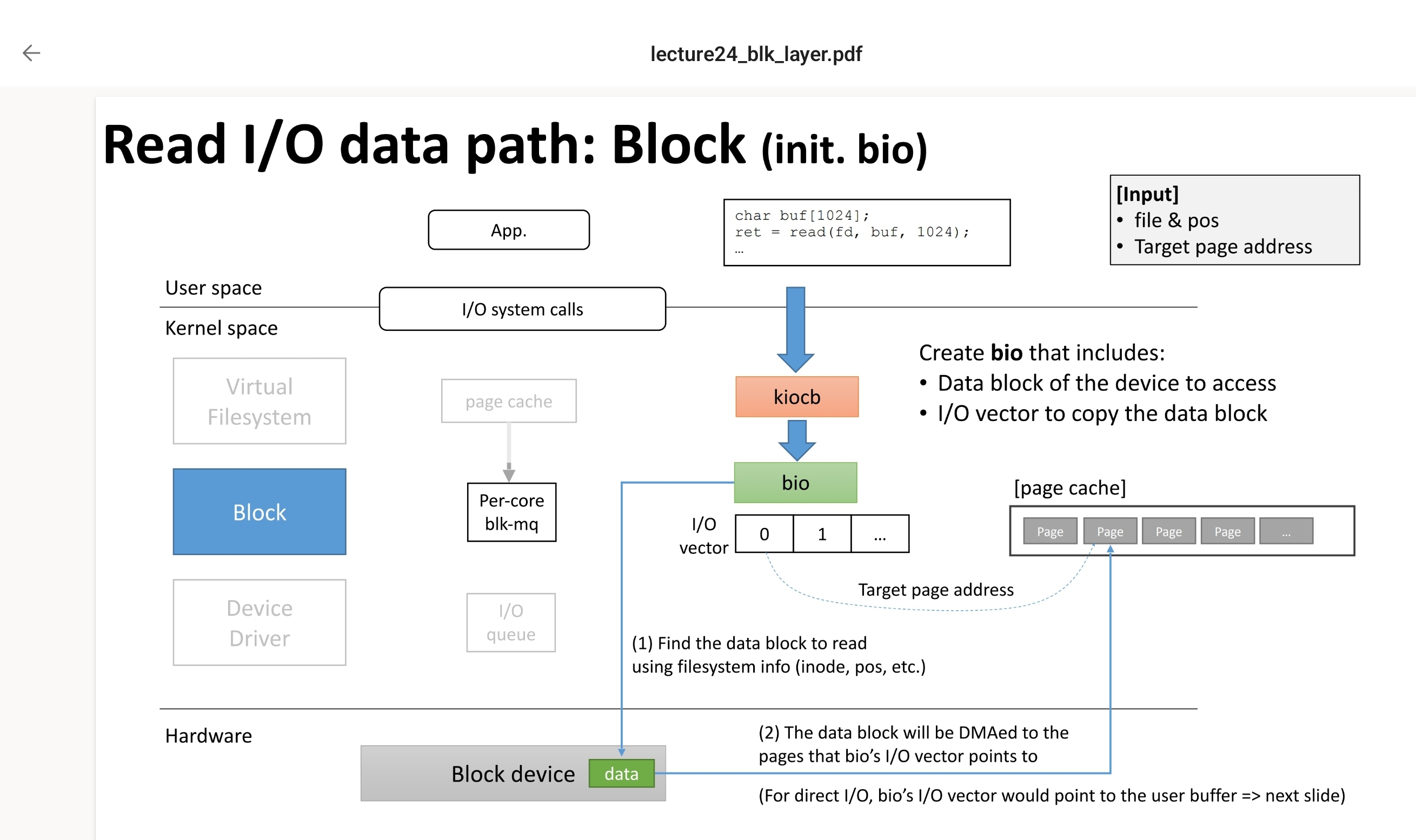
而对于Direct IO过程,请看图示: 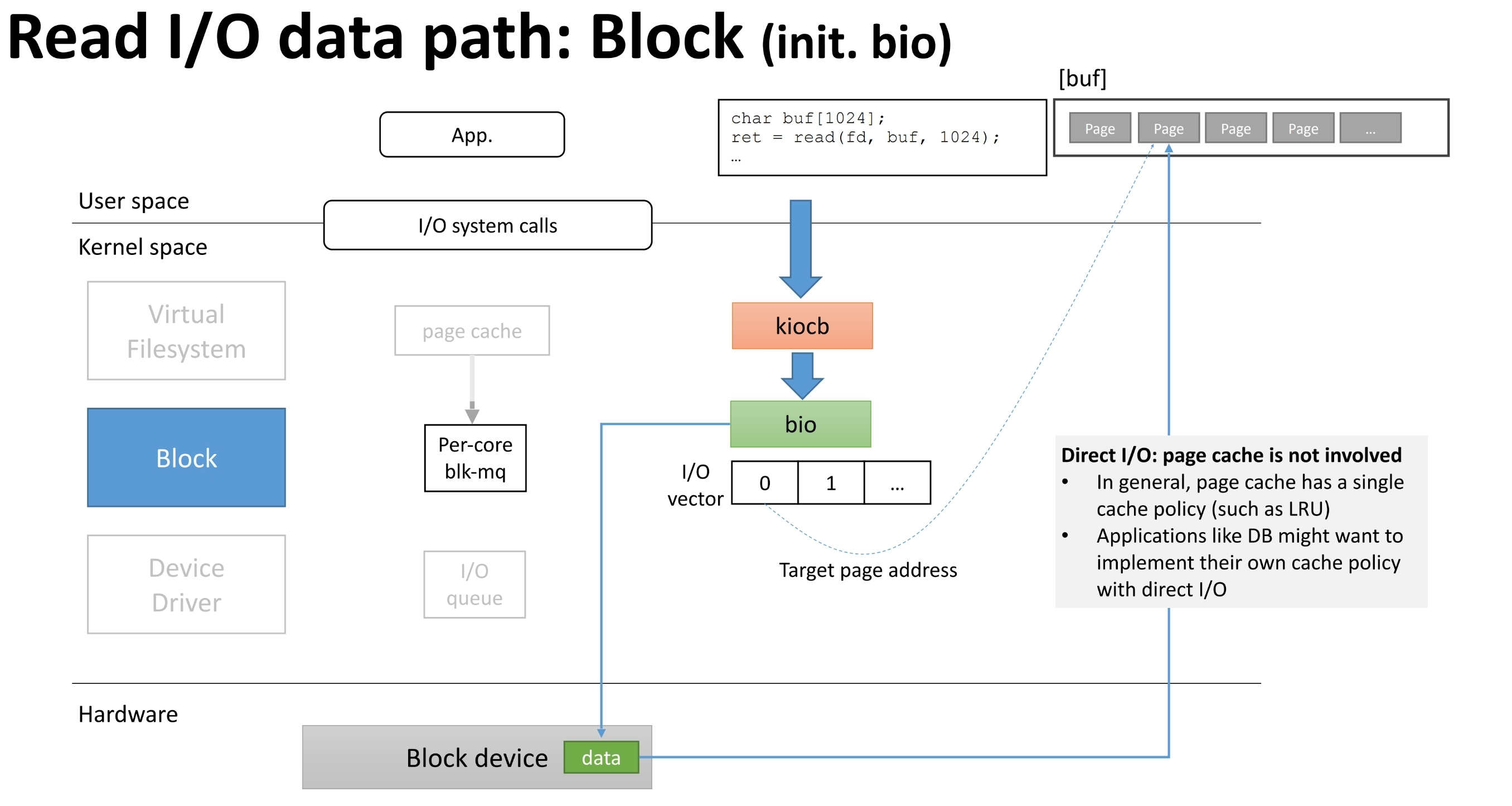
可以看到在Block层有blk-mq,这一层的具体机制可以去看linux kernel文档:docs.kernel.org/block/blk-mq.html
blk-mq
多队列块IO排队机制依赖于现代存储设备的并行能力,
通信层面-json和msgpack
json数据可能是用于数据交换任务中最常见的交换格式,我认为json的流行主要源于其表达能力强以及人类可读性强,在不伤害上面两个关键特性的前提下,我们考虑优化json数据交换的效率,其中一个非常有代表性的工作就是msgpack。
在msgpack官网就可以看到对于这种序列化方法的描述:本身实际是一种二进制交换格式。其中一些著名的软件如redis就使用了这一种数据交换格式。使用官方的demo你可以尝试将json数据变成msgpack(十六进制数),并且能看到压缩比。所以事实上msgpack是一种序列化标准,它有两个组成部分:类型系统以及格式,序列化的过程试讲应用对象转换为msgpack格式,反之亦然。
首先,msgpack类型包括integer,nil,boolean,float,raw(包括string和binary,前者为utf8字符串,后者为字节阵列),array代表一种对象的序列,map亦然,还有Extension类型。 Extension类型非常关键
访问方法
存储特征和存储应用设计
存储软件&分解&测试
存储追踪工具:blktrace
blktrace是块IO层级的追踪工具,当你要了解每个下发到块设备的IO操作时,blktrace是最合适的工具,该工具还服务于IO领域内的内核开发者 对比一下,blktrace和iostat:iostat提供了获取向目标设备的请求队列获取信息的能力,但并不覆盖每一个IO
blktrace是很多工具的基础:ioprof, seekwatcher, iowatcher,首先分析一下,一个IO请求,从应用层到块设备,路径如下:
blktrace重点分析的过程是block layer中的过程,因此对于block-io过程想要挖掘细节也可以参考这一部分。 我们考虑一个IO进入到block layer,会经历的过程:
- remap:io被device mapper(DM)或者multiple device(MD)映射到其他设备
- split:IO请求可能会因为扇区边界未对齐,size太大而被拆分成多个物理IO
- merge:可能会因为与其他IO请求的物理位置相邻而合并成一个IO
- 被IO Scheduler依照调度策略发送给driver
- 被driver提交给硬件,经过HBA,电缆,交换机(SAN),最后到达块设备,完成IO请求,将结果返回
blktrace可以将内核态的IO过程记录下来,来看一条典型的trace命令
blktrace -d /dev/sda -o - | blkparse -i -将上述过程分解后表示则:
Q------->G------------>I--------->M------------------->D----------------------------->C
|-Q time-|-Insert time-|
|--------- merge time ------------|-merge with other IO|
|----------------scheduler time time-------------------|---driver,adapter,storagetime--|
|----------------------- await time in iostat output ----------------------------------|关于这些大写字母所代表的事件,我们在下面补充。
我们来分析blktrace的输出: 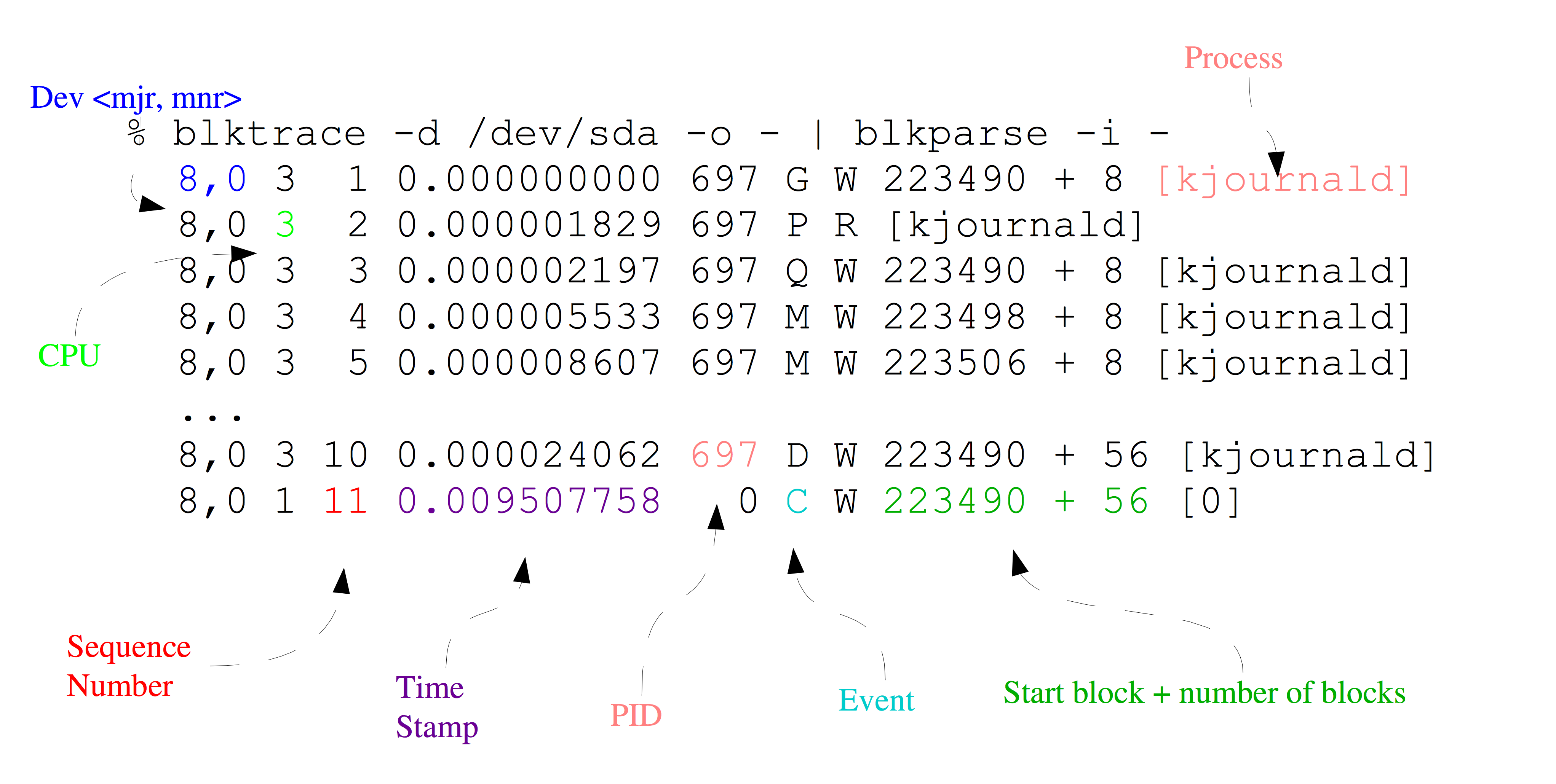
- 第一个字段:8,0 这个字段是设备号 major device ID和minor device ID。
- 第二个字段:3 表示CPU
- 第三个字段:11 序列号
- 第四个字段:0.009507758 Time Stamp是时间偏移
- 第五个字段:PID 本次IO对应的进程ID
- 第六个字段:Event,这个字段非常重要,反映了IO进行到了那一步
- 第七个字段:R表示 Read, W是Write,D表示block,B表示Barrier Operation
- 第八个字段:223490+56,表示的是起始block number 和 number of blocks,即我们常说的Offset 和 Size
- 第九个字段: 进程名
关于第六个字段的值,其可能的范围主要是这一些:
A IO was remapped to a different device
B IO bounced
C IO completion
D IO issued to driver
F IO front merged with request on queue
G Get request
I IO inserted onto request queue
M IO back merged with request on queue
P Plug request
Q IO handled by request queue code
S Sleep request
T Unplug due to timeout
U Unplug request
X Split我们根据上面信息,来重新看下几个阶段的数据表征。
Q2G:生成IO请求所消耗的时间,包括remap和split; G2I:IO进入IO Scheduler所消耗的时间,包括merge的时间; I2D:IO在IO Scheduler中等待的时间; D2C:IO在driver和硬件上所消耗的时间; Q2C:整个IO请求所消耗的时间
使用案例
我们可以根据自己的需求创建一种标准化的IO测试流程来更好地获取被测系统以及测试任务的特征,假设我们的目标程序可以通过shell方式唤醒,我们采用事后分析的方法,使用blktrace配合blkparse,btt等结果分析工具来协助分析。
首先,blktrace的目标是具体的块设备,默认输出文件名是<device>.blktrace.<cpu>,如果想要分析某个进程的执行结果怎么办呢,目前能想到的方法仍然是尽可能的让目标系统处于IDLE状态(控制其他服务,将非必须启用的服务都暂停),然后使用shell同时启动目标软件和blktrace
# 使用blktrace监控sda持续性20秒,解析结果存在/data目录下
blktrace -d /dev/sda -o /data -w 20
# 将per cpu结果合并为一个二进制结果
blkparse -i <device> -d <device>.blktrace.bin
# 使用btt进行阶段分析
btt -i <bin> -l <output>
# live模式分析
btrace /dev/sda实际上用作分析最重要的软件是btt,btt工具能够提炼出的最具概括性的信息是在trace阶段获得的IO的上述各阶段的时间开销(最小值,平均值,最大值),其中有两个特别重要的阶段,即D2C和Q2C,前者表征了块设备本身的处理能力,如果D2C的MAX越大,代表设备的tail latency越高。后者代表的是一个IO请求在块层的全部时间,Q2C - D2C代表了内核软件栈的延迟。
实现原理分析
这一小节记录的信息来源于网络上各路分析博客,作为下一小节-实现分析的预备部分。
首先看blktrace的实现,我们先参考其User Guide: allstar.jhuapl.edu/repo/p1/amd64/blktrace/doc/blktrace.pdf
btt分析的数据都是对于单一事件的记录,btt是如何做聚合的呢?
Doxygen-代码分析
首先讲下在doxygen wizard的界面上的配置改进,在Mode下Select the desired extraction mode中选择All Entities,同时勾中Include cross-referenced source code in the output,编程语言的优化则根据项目的语言配置来选择(如C/C++)。
输出主题下,HTML选择with navigation panel并勾选With search function;不必选择Latex(消耗生成时间,但是产物意义不大)
Diagrams下为了有更丰富的图例,选择GraphViz来生成目标,勾选所有Dot graphs
Project是BUILTIN—STL—SUPPORT,主要为CPP服务。BUILD中要讲EXTRACT STATIC和讲EXTRACT PRIVATE选中
BUILD下将SHOW_GROUPED_MEMB_INC勾选
Source Browser需要勾选REFERENCED_BY_RELATION,以及REFERENCES_RELATION
Dot是DOT_GRAPH_MAX_NODES修改为100,UML_LOOK需要勾选,UML_LIMIT_NUM_FIELDS修改为0。TEMPLATE_RELATIONS=yes
关于C++项目的配置优化,可以参考codeyarns.com/tech/2014-06-18-how-to-configure-doxygen-for-c-code.html。
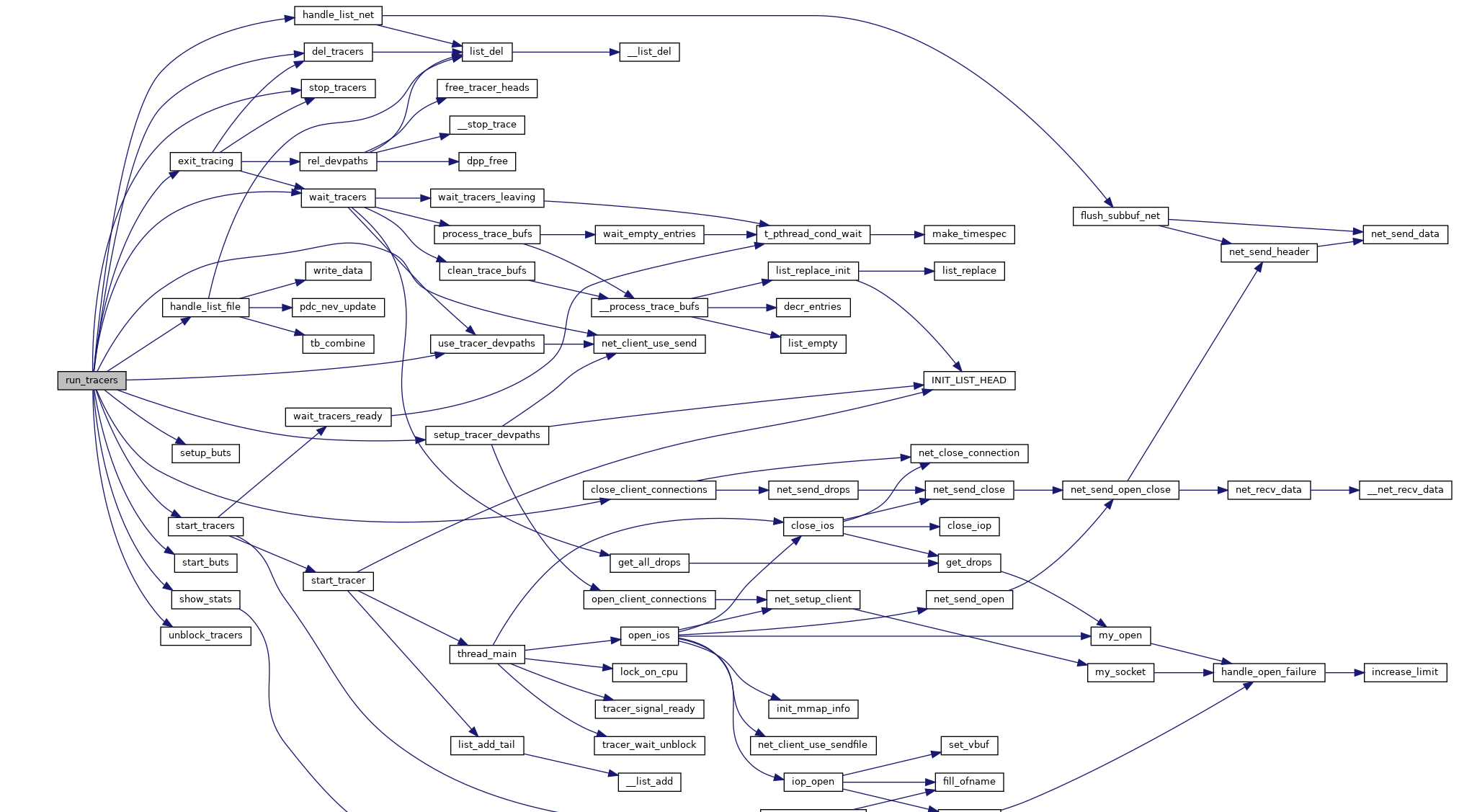
我们按照上面的配置,来生成blktrace的doxygen文档。
可以看到main函数中关键的执行流就在于run_tracers,我们点击查看其调用关系:
blktrace.c文件的依赖中blktrace_api.h定义了关键的几个操作:
- BLKTRACESETUP
- BLKTRACESTART
- BLKTRACESTOP
- BLKTRACETEARDOWN
这些宏展开后是ioctl.h中系统调用的接口,用于设备驱动程序和用户空间程序间的通信。在启动blktrace的时候使用strace可以看到调用了ioctl的两个命令,即BLKTRACESETUP和BLKTRACESTART,
有哪些衡量指标
我们结合IO理论部分考虑这些可能的指标:
- 性能
- 大IO带宽极限
- 小IO带宽极限
- IO延迟
- 能耗
测试基准&测试
我们先从日常使用、企业级场景、压测这几个维度出发,去考虑三个场景下对于IO任务的一些需求,我们很难将所有场景覆盖完整,因为这个领域(数据存储)所覆盖的内容实在是过于庞大,因此我们从最常见的场景出发来考虑。
data deduplication(重删压缩)
个人用户的日常使用
- windows场景、linux场景都需要考虑
- 移动设备的测试需求
个人测试工具
- fio
企业使用的存储设备
企业市场一定是相对个人来说更加高端的场景(虽然像废话),我们考虑下对于企业来说,数据存储可能需要具备的特点:
- 高容错
- 容灾
- 超低时延
- 高容忍
企业测试工具
- COSBench 0.4.2.c4
- Vdbench50406
- S3 Browser
容量检测
步骤:
- 查看SUT文件/对象存储剩余裸容量A
- 使用vdbench向分布式文件/对象存储写入数据量为B的文件/对象数据,再查看剩余容量C
- 则评估有效容量: A*B / (A-C)
一般企业级的有效容量不低于1PB
接口测试
测试NFS的文件接口是否正常工作,包括:
- 创建NFS协议挂在的共享目录
- 目录创建,重命名,删除;
- 文件创建,修改,移动,重命名,删除;
- 卸载共享目录/重新挂载
其他协议还有ftp(目录创建,重命名,文件上传,下载,删除) Windows的CIFS(和NFS的测试类似)
测试S3接口,完成配置后,启动S3服务,通过S3 browser完成:
- 创建桶,上传对象,查看桶内对象;
- 下载上传的对象,查看对象是否一致;
- 删除桶对象,批量删除桶对象;
- 查看桶内对象是否被成功删除
- 删除桶
IPV4,IPV6网络测试
功能测试
- 图形化管理
- 冗余策略配置
- 系统资源监控:CPU占用率,总空间,已用空间,读写带宽,读写IOPS
- 节点间的负载均衡:在客户端运行vdbench/cosbench,在5~10个目录下创建150~300个256~512MB的文件;1个桶内创建15000~30000个512MB的对象顺序写入。数据创建过程中查看各节点情况,单个节点需在该类节点均值的20%上下限内。
- 目录配额,为目录创建快照,WORM期特性
- 节点并发数设置