并行编程
GPU硬件模型
我们以nvidia-gpu为例,因为nvidia是这一领域的先行者。

其实"CUDA"一词除了被引申为我们常说的并行编程模型外,还可用于指代硬件架构,这种说法参见https://modal.com/gpu-glossary/device-hardware/cuda-device-architecture。gpu硬件的通用硬件模型可以这样表达:
每一个设备都由多个流式多处理器(streaming multiprocessors)构成
每个处理器由多个Cuda cores/Tensor cores构成
想找具体的例子,可以看tesla p100发布白皮书中的内容:https://images.nvidia.com/content/pdf/tesla/whitepaper/pascal-architecture-whitepaper.pdf
SMs
gpu上运行推理任务,其实可以被看作是这样一个过程:SMs在运行大量的流处理器汇编代码,我们以H800(下图)为例——蓝色为内存,绿色为core,橙色为调度单元

以H800为例,它峰值功率为700w,132个流处理器,每个具有4个warp调度器,而每个调度器又能以32个线程并行地发送指令,所以一个SM的并行度是4*32=128,同时,一个SM的并发容量是2048,GPU使用极其高效的warp切换技术能够实现最高25万个任务并发的效果
Core
core是组成流处理器的基本组件,包括两种类型:cuda-core和tensor-core
相对于gpu的core,我们一般更了解cpu的cpu,并可能会把它们联系到一起,事实上他们很不一样。相较于tensor-core,cpu的core和SM更像,因为他们都拥有寄存器可以暂存数据。
SFU
special function unit。用来计算特殊数学元算的单元:比如exp,cos,sin
warp调度器
loopy并行模型
loopy软件架构
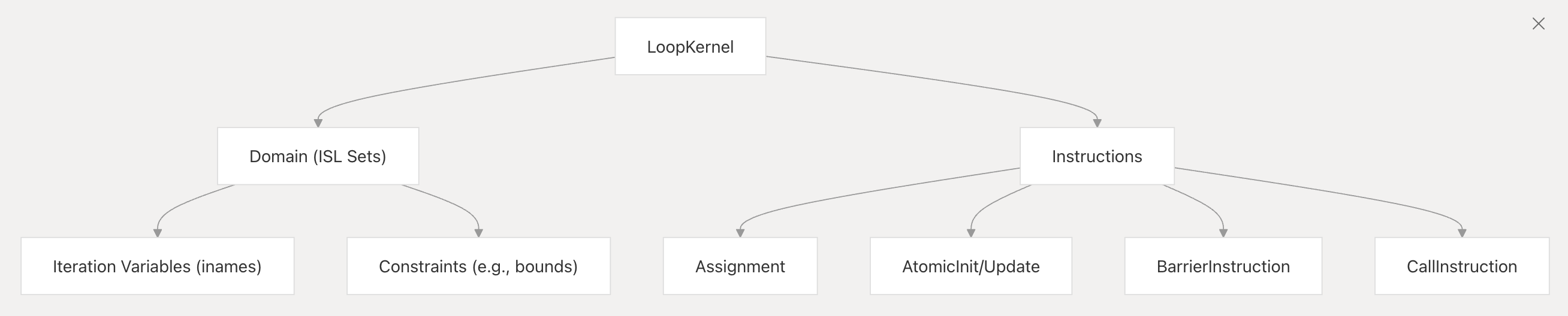
loopkernel
这个结构包含了生成代码所需要的全部信息
它包含了这些信息:
- Domains: 迭代空间的约束和迭代变量
- Instructions: 需要执行的计算操作
- Arguments: 输入和输出参数
- Temporaries: 计算过程中的临时变量
- Dependencies: 指令和迭代之间的关系
- Options: kernel的配置参数
preprocess过程
- 类型推断: 变量和表达式的类型推断
- Common subexpression elimination (CSE): 识别并消除重复的表达式
- 依赖分析: 识别表达式之间的关系
- Domain transformation: 修改迭代空间
相关的功能在__init__.py的85行和210行进行导入
transformation系统
优化实际上是通过各类变换来达到的,这可以说是loopy。为此,loopy的核心代码中存在一个transformation系统,kernel被传递进管道系统中,经过一层层的优化,变成了最终被完整优化的kernel代码。
expression系统...
其他模型细节参见https://deepwiki.com/inducer/loopy/1.1-architecture
loopy并行模型
Inames&Domains
Inames代表Iteration name,Domains代表
宏观优化技术
- 并行性映射 (Parallelism Mapping): 通过
lp.tag_inames,你可以将loopy中的iname(循环索引) 精确地映射到 CUDA 的blockIdx,threadIdx(包括x,y,z维度) 以及warp相关的索引。这使得你可以精细控制计算如何在 GPU 的不同层级并行单元上执行。- 例如,
loopy/target/cuda.py中定义了如lp.CUDABlockIndexTag,lp.CUDAThreadIndexTag等。
- 例如,
- 内存层级优化 (Memory Hierarchy Optimization):
- 共享内存 (Shared Memory): 你可以将数组标记为使用
AddressSpace.LOCAL(在loopy/kernel/data.py中定义),loopy的 CUDA 后端会将其转换为__shared__内存。通过lp.buffer_array等变换,你可以显式地控制哪些数据被加载到共享内存中,以及如何组织(例如,通过分块)。 - 寄存器使用: 通过循环展开、数据私有化 (
lp.privatize_array) 等变换,可以增加数据在寄存器中的重用机会,减少对低速内存的访问。 - 全局内存访问模式: 变换如
lp.split_iname后进行lp.tag_inames可以帮助实现合并的全局内存访问 (coalesced access)。lp.add_prefetch可以用于显式的数据预取。
- 共享内存 (Shared Memory): 你可以将数组标记为使用
- 指令级优化 (Instruction-Level Parallelism - ILP):
- 循环展开 (
lp.unroll_iname) 可以减少循环开销,并为编译器提供更大的指令调度窗口。 loopy允许你指定数学运算的精度,或者使用特定的函数(如果后端支持)。
- 循环展开 (
- 代码结构变换:
- 循环融合/分裂 (Fusion/Fission)
- 循环交换 (Interchange)
- 预计算 (
lp.precompute):将循环不变量或重复计算提前。
cuda
triton
运行链路
- @triton.jit 包装的 kernel 第一次被调用时,JITFunction.run 会根据参数实例化编译配置;若缓存未命中,则进入 _do_compile(python/triton/runtime/jit.py:651-702)。
- _do_compile 调用 python/triton/compiler/compile,后者通过 pybind11 暴露的 triton._C.libtriton(见 python/src/*.cc)驱动 MLIR/LLVM 管线,把 Triton AST 降级 到 .ttir → .ttgir → .llir → ptx/llvm,并用对应 backend(CUDA→third_party/nvidia/backend/compiler.py,AMD→third_party/amd/backend/compiler.py)生成目标二进制; 结果封装在 CompiledKernel(python/triton/compiler/compiler.py:400-498),并写入磁盘缓存 ~/.triton/cache。
- CompiledKernel.asm 同时保存多层 IR 文本和最终二进制:NVIDIA backend 的binary_ext="cubin"(PTX 通过 ptxas 装配后得到 CUBIN);AMD backend 的binary_ext="hsaco"(ROCclr 生成 HSACO)。
加载与调用
- 运行时真正 launch 前,CompiledKernel._init_handles 会调用活跃 driver(triton.runtime.driver.active)来准备句柄:
- driver.active.launcher_cls(NV: CudaLauncher at third_party/nvidia/backend/driver.py:673-714;AMD 有同构的 HipLauncher)会即时生成一段 C host stub,通过 compile_module_from_src(python/triton/runtime/build.py:32-106)编译出一个 CPython 扩展模块;这个模块的 launch 函数负责把 Python 对象/张量转换成裸指针、填 充参数数组以及调用底层 driver API。
- driver.active.utils.load_binary 则是另一个随构建产出的扩展(NV: cuda_utils),内部调用 cuModuleLoadData/hipModuleLoadDataEx 把 cubin/hsaco 加载到 GPU 模 块,并返回函数指针(third_party/nvidia/backend/driver.c:482-520 等)。
- 若 kernel 需要临时 scratch buffer,CudaLauncher.call 会按 grid 规模向设备分配,再把指针传给 launch。
- 完成上述准备后,CompiledKernel.run 会把 packed metadata、实际参数与可选 hook 交给 launcher,后者最终执行 cuLaunchKernelEx 或 HIP 对应 API,将 GPU 函数提交到当前 stream(third_party/nvidia/backend/driver.py:488-520 + 320-376)。
Python 侧如何“调用” PTX/HSACO
- Python 自身并不直接执行 PTX/HSACO,而是在第一次运行时驱动编译管线产出 cubin/hsaco,随后通过动态生成的 C 扩展调用 CUDA/HIP Driver API 把二进制装载并 launch。
- 这些扩展模块和 MLIR 编译器桥接体(libtriton.so)都在安装阶段用 pybind11/C API 构建;Python 运行时只需 import 并调用它们提供的函数。
- 之后相同 specialization 再次运行时会命中 kernel_cache 与磁盘缓存,跳过编译直接复用已加载的 GPU module;若上下文/设备切换,则重新加载但仍复用已有二进制。
小结 Triton 通过 MLIR/LLVM 在首次调用时产出目标二进制(PTX→CUBIN、HSACO),再由 runtime driver 把它载入 GPU 并使用即时编译的 C launcher(借助 pybind11/C API)发起 kernel launch。整个链路让 Python 代码拥有“先 Python 语言层构造 → 当场编译 → 直接驱动 GPU” 的体验,同时保持二进制缓存与跨层调试能力。
luminal
egglog转换系统是为了得到更加高效的内核,所以我们得先简单了解egglog数据结构